手部精细动作的功能恢复对卒中后偏瘫患者的日常生活回归至关重要,同时也是卒中康复治疗面临的重要挑战。现有的基于穿戴设备的镜像康复系统通常需要患者的健侧佩戴传感手套,并在医师协助下使用。这不仅增加了人力成本,还加重了患者的心理负担,限制了患者自主训练能力。
近日,我院生物医学工程系本科生陈哲宇在李建清团队李亮、刘宾、朱松盛等老师的共同指导下于《Actuators》期刊发表了题为《An Active-Vision-Assisted Low-Load Wearable Hand Function Mirror Rehabilitation System》的研究论文。该工作设计了一种基于主动视觉的低负载穿戴式手功能镜像康复机器人系统,为解决镜像手功能康复中患者健侧需要佩戴额外传感装置的问题提供了新方案。
论文设计的系统构建了一种具备主动视觉装置,能够主动调整位置和视角,实现在镜像康复过程中对健侧运动意图的无感监测。患者只需佩戴患侧手的器械,即可独立完成镜像训练,有效促进自主康复。研究团队成功构建了系统样机,采集了手部姿势识别数据集,并完成了系统性能与功能测试。
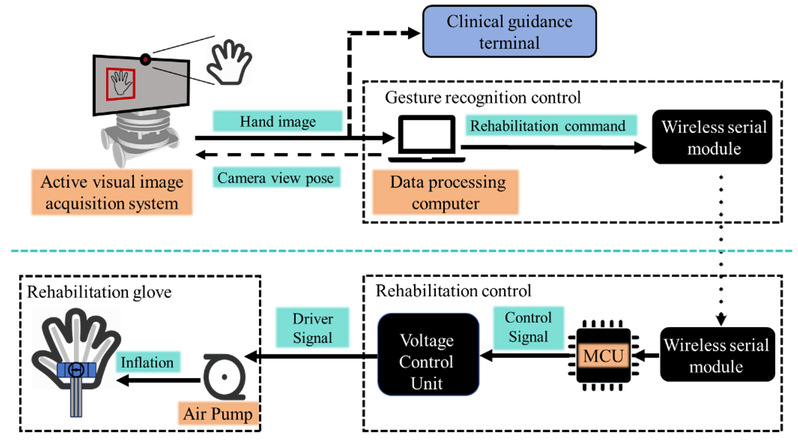
论文所提出系统框架
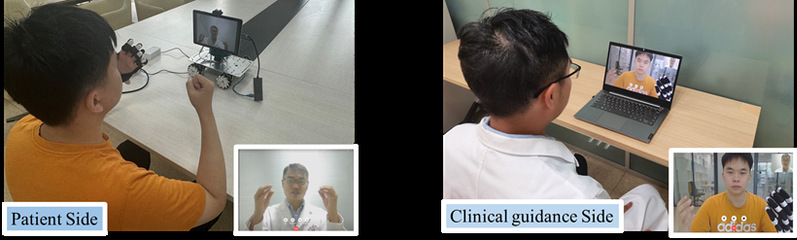
主动视觉辅助远程康复功能演示
我院本科生陈哲宇为论文独立第一作者,本科生王焕均、杨喻冰、陈立超、颜志龙、肖国力、孙艺为论文共同作者。我院李亮老师、刘宾副教授、李建清教授为论文共同通讯作者。
论文源于2022大学生创新创业项目(202210312098Y-主动立体视觉人体追踪系统的构建及其在卒中康复机器人中的应用探索),受国家重点研发计划、江苏省产业前瞻项目、江苏省自然科学基金等项目支持。
论文相关方法目前已申请发明专利(手功能康复系统及其控制方法,CN202410535301.8,杨喻冰; 陈立超; 陈哲宇等),获江苏省生物医学创新设计大赛三等奖,并在2023年中国生物医学工程大会上进行壁报展示。
(撰稿/陈哲宇;图片/李亮;审核/姜海兰)